Robot per formazione - HTBLuVA Salisburgo
Cosa serviva:
braccio robotico facile da controllare
Requisiti:
economico, modulare, precisione nell'ordine di 0,1 mm
Materiale:
robolink RL-DC-5
Settore:
istruzione/formazione
Successo per il cliente:
braccio robotico economico, facilmente integrabile in un concept globale esistente con un sistema di controllo di terzi
braccio robotico facile da controllare
Requisiti:
economico, modulare, precisione nell'ordine di 0,1 mm
Materiale:
robolink RL-DC-5
Settore:
istruzione/formazione
Successo per il cliente:
braccio robotico economico, facilmente integrabile in un concept globale esistente con un sistema di controllo di terzi

Vai all'applicazione
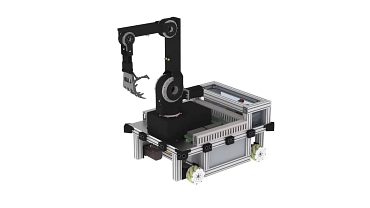
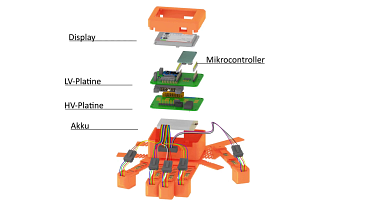
L'HTBLuVA di Salisburgo ha sviluppato questa collaborazione uomo-robot con un sistema di controllo gestuale/mimico nell'ambito di un progetto educativo. Ha quindi creato un robot versatile, utilizzando il veicolo a guida automatica (AGV) abbinato al braccio robotico provvisto di griffe di presa.Il problema
I progetti di questo tipo richiedono componenti eccezionalmente convenienti, ma con la massima interoperabilità, in modo da consentire l'interazione tra i vari gruppi.In questo caso, sia l'AGV per lo spostamento nello spazio di lavoro che il braccio robotico con presa a pinza erano controllati tramite il guanto tattile.
La soluzione
Un robolink DC economico (modello a 5 assi) con tecnologia di controllo del motore B&R, abbinato ad AGV, dispositivo di presa e guanto, che fornisce il riscontro tattile.
Configuratore robolink
Scopri il configuratore online
I configuratori online sono intuitivi e consentono di creare il tuo robot a braccio articolato robolink con pochi clic. Veloce, personalizzato e a prezzo fisso.Scopri subito la libertà infinita, grazie ai nostri strumenti.
Vai al configuratore

Shop per l'automazione low-cost
Robotica conveniente per il tuo progetto di automazione
Trova il robot adatto alla tua applicazione nel nostro shop online.Sfogliare, ottenere informazioni e ordinare con facilità.
Vai allo shop online
