Precise, clearance-free plain and linear bearings for assistant robots in surgery
For absolutely clearance-free bearings in surgical applications, drylin glide bars were installed in robots, among other things
This system, developed at the Institute for Mechatronic Systems at Leibniz University Hannover, assists doctors in minimally invasive cochlear implant surgery for the treatment of sensorineural deafness and profound hearing loss. The technique requires a puncture hole that can be located up to 35mm below the skull and in the immediate vicinity of anatomical structures that require protection. The system must therefore work very precisely and also meet medical hygiene requirements such as steam sterilisation. The surgical instrument guide now includes a drylin N glide bar with two carriages. In addition, several iglidur X plain bearings are used, which are ideally suited for use in medical applications due to their freedom from lubricants.Profile
- What was needed: drylin N guide rail and carriage, iglidur plastic bearing
- Requirements: High-precision, absolutely clearance-free bearing supports were needed, which had to be easy to clean under the high clinical requirements. In addition, no lubricants were allowed to be used in the bearings.
- Industry: medical equipment
- Success for the customer: Thanks to the plastic bearings used, a bone-anchored surgical instrument guidance could be developed, constructed and evaluated for the first time, which is characterised by universal applicability and reusability as well as patient-specific adaptability.
Discover all products for medical technology
Products used
Problem
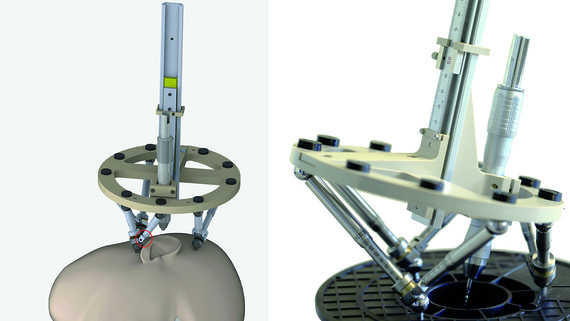
Minimally invasive cochlear implant surgery is a new, gentle surgical technique for treating sensorineural deafness and profound hearing loss. This technique requires the creation of an access to the inner ear from the surface of the skull to the basal turn of the cochlea, which can be located up to 35mm below the skull. As the deviations from the target point at a depth of 35mm must not be greater than 0.5mm, an assistance system is required that enables highly accurate, intraoperative translational instrument guidance. A miniaturised, passive parallel kinematic robot was therefore developed, which can be rigidly anchored directly to the patient's skull with three basic joints. In this function, the parallel robot provides a linear guide for creating the minimally invasive access, which can be equipped with surgical instruments and customised for each patient using six length-adjustable thrust actuators.In addition to the technical requirements, boundary conditions with regard to clinical use must also be taken into account when implementing the linear guide. Due to the high precision requirements of surgery, all of the robot's bearings and joints must be as rigid as possible and absolutely clearance-free. The same applies to the linear guide for holding a surgical drilling tool. The clinical application also includes cleaning, disinfection and steam sterilisation (134°C, 3 bar, 5 minutes) of all components.
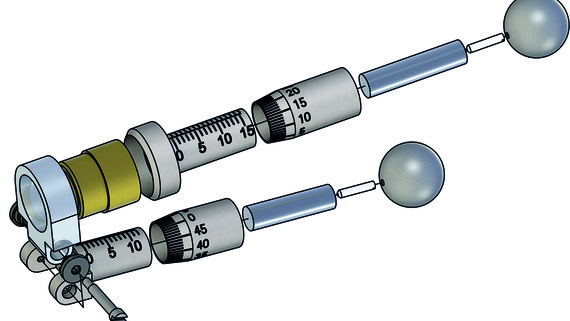
Furthermore, conventional lubrication of the guide is not possible. Comparable requirements also apply to the rotary joints, which are used to connect two length-adjustable thrust actuators to each other: Both axial and radial clearance must be completely eliminated and bearings with rolling elements must not be used.
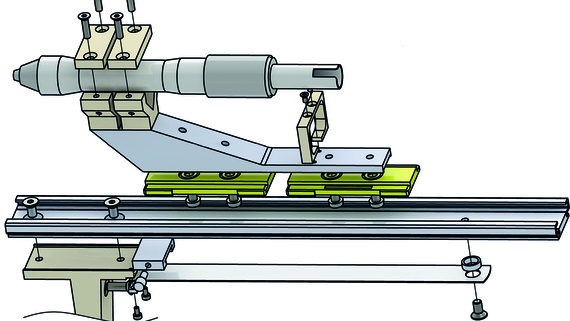
Solution
Various plastic bearings were used to realise the bone-fixed parallel robot due to the requirements described. The surgical instrument guidance comprises, for example, a drylin N glide bar with two carriages. The latter are rigidly connected to each other by means of a stainless steel component (interlocking) to minimise clearance, which cannot be completely avoided for guide systems due to their design principle. This tool guide entirely fulfils the stated requirements (in particular: no rolling elements, no need for lubricants) and can be easily dismantled, cleaned and reassembled due to the open design of the rail. In addition, the interchangeability of the carriages offers a wide range of options for carrying out intraoperative tool changes. Two push actuators of the parallel robot were connected by means of a rotary joint. The axis of this rotary joint is formed by an adapter screw, whereby the radial clearance is absorbed by two steam-sterilisable iglidur X slide bearings. The joint can also be axially pre-loaded by tightening the adapter screw. Thanks to the plastic bearings used, a bone-anchored surgical instrument guide could be developed, constructed and evaluated for the first time, which is characterised by universal applicability and reusability as well as patient-specific adaptability. The fulfilment of the accuracy requirements has been successfully proven experimentally.