Prelievo da nastro trasportatore
Cosa serviva:
robot pick & robot per nastro trasportatore con sistema di videocamere
Requisiti:
soluzione multifunzione economica e facile da integrare
Materiale:
robot lineare igus, igus Robot Control e sistema di videocamere
Settore:
industria cosmetica
Successo per il cliente:
soluzione coordinata con integrazione semplice
robot pick & robot per nastro trasportatore con sistema di videocamere
Requisiti:
soluzione multifunzione economica e facile da integrare
Materiale:
robot lineare igus, igus Robot Control e sistema di videocamere
Settore:
industria cosmetica
Successo per il cliente:
soluzione coordinata con integrazione semplice

Vai all'applicazione
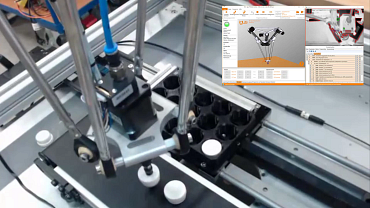
Ogni nastro trasportatore prevede (quasi) sempre un robot a geometria delta.In questo caso, i flaconi di crema vengono smistati in blister nell'industria cosmetica. Una tipica applicazione di pick & place al termine del processo di produzione.
Il problema
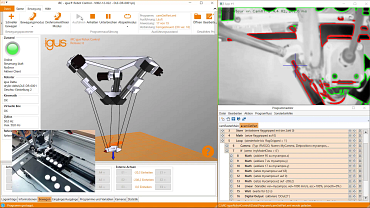
Poiché i flaconi vengono rilevati in base alla posizione e devono essere ruotati, il sistema di visione registra sia la posizione sul nastro che quella sulla testa. Il sistema deve essere inoltre in grado di raggiungere una velocità elevata sia nel rilevamento che nell'attività di pick & place.La soluzione
L'applicazione è composta da un nastro trasportatore, un robot a geometria delta a 3 assi, un sistema di visione e igus Robot Control, che riunisce tutti gli elementi nel software e rende possibile un'applicazione di pick & place automatizzata.
Shop per l'automazione low-cost
Robotica conveniente per il tuo progetto di automazione
Trova il robot adatto alla tua applicazione nel nostro shop online.Sfogliare, ottenere informazioni e ordinare con facilità.
Vai allo shop online
