Falangi delle dita stampate in 3D in un esoscheletro
Attrito ridotto, leggeri e su misura - componenti stampati velocemente per applicazioni terapeutiche
- Cosa serviva: giunti delle dita per un esoscheletro
- Metodo di produzione:sinterizzazione laser selettiva con polvere SLS
- Requisiti: basso coefficiente d'attrito, resistenza all'usura, peso ridotto, precisione
- Materiale: iglidur I6
- Settore: medicale
- Successo per il cliente: consegna rapida, produzione economica di componenti funzionali su misura
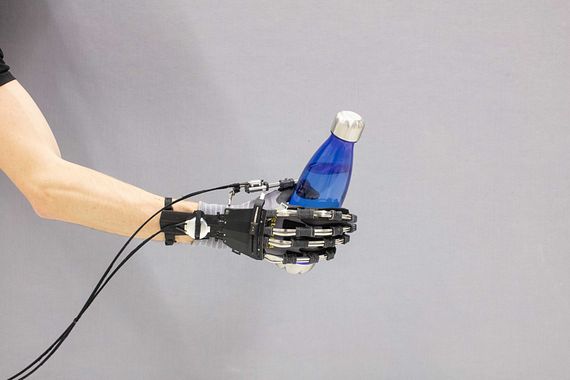
Secondo la German Stroke Association, in Germania ogni due minuti qualcuno ha un ictus. Per facilitare il riapprendimento della capacità di stringere le cose dopo un ictus, la Eidgenössische Technische Hochschule Zürich (università ETHZ) ha sviluppato un esoscheletro chiamato RELab tenoexo, in grado di svolgere fino all'80 percento delle attività quotidiane. Le falangi delle dita stampate in 3D nel polimero ad alte prestazioni iglidur I6 garantiscono una trasmissione ottimale della forza.
Maggiori informazioni su iglidur I6

Problema da risolvere
La produzione dei giunti delle dita con una stampante 3D classica si è rivelata difficile, in quanto la risoluzione del dispositivo non era sufficiente per creare la struttura necessaria delle falangi delle dita. Questi componenti non solo tengono insieme le molle a balestra, bensì hanno un complesso meccanismo di chiusura per una cinghia di cuoio. La fibbia in cui si infila la cinghia è appena più larga di un millimetro. Il filamento ABS come materiale di stampa si è dimostrato inadeguato perché l'attrito tra i giunti e le molle a balestra era troppo elevato, provocando un eccessivo consumo di energia.Soluzione
Alla fine ETH Zürich ha trovato iglidur I6, una plastica tribologicamente ottimizzata che si è rivelata ideale per i componenti necessari. La polvere SLS è stata appositamente sviluppata per ridurre la frizione in applicazioni in movimento La sinterizzazione laser offre un'alta precisione e consente quindi di creare la complessa struttura del giunto. Grazie al rapido servizio di stampa 3D di igus, i giunti delle dita sono stati realizzati in modo veloce ed economico, pronti per essere utilizzati.Struttura dell'esoscheletro della mano e suo funzionamento
La struttura delle dita è stata concepita dal professore giapponese Jumpei Arata della Kyushu University: tre sottili molle a balestra in acciaio inossidabile sono posizionate una sopra l'altra e collegate mediante quattro giunti di plastica. Un cavo Bowden viene collegato alla molla centrale - se si muove in avanti, le dita si chiudono; se va indietro, la mano si apre. Motori DC contraggono e distendono le molle a balestra e supportano il paziente quando compie movimenti per stringere qualcosa. "Per ogni dito l'esoscheletro può generare una forza di sei Newton", afferma Jan Dittli, ricercatore presso l'ETHZ Department for Health Science and Technology. "I tre movimenti di stretta implementati sono sufficienti per sollevare oggetti fino a circa 500 grammi, ad es. una bottiglietta d'acqua da mezzo litro."L'esoscheletro è messo in tensione mediante un bracciale dotato di sensori ed è attaccato alle dita mediante delle cinghie di cuoio. Quando il paziente inizia a muovere la mano, il bracciale trasmette segnali elettromiografici (EMG) a un microcomputer. Quest'ultimo si trova in uno zaino insieme a motori, batterie ed elettronica di controllo, e lo zaino a sua volta è collegato al modulo della mano. Se chi lo indossa intende compiere movimenti di presa, il computer lo rileva, attivando i motori DC.
Durante lo sviluppo, i ricercatori hanno dovuto affrontare una sfida: i delicati giunti delle dita. Questi elementi non solo tengono insieme le molle a balestra, bensì hanno un complesso meccanismo di chiusura per la cinghia di cuoio. La fibbia in cui si infila la cinghia è appena più larga di un millimetro. Per realizzare il retro della mano è stato usata una stampante 3D con un filamento ABS, ma sia il metodo di produzione che il materiale si sono rivelati inadeguati per la produzione dei giunti delle dita. "L'attrito tra i giunti e le molle a balestra sarebbe stato troppo elevato per questo materiale", spiega Dittli. "Quindi sarebbe servita troppa energia per muovere le dita. "La risoluzione di una normale stampante 3D non era sufficiente per riprodurre la struttura dettagliata delle falangi delle dita.

iglidur I6 - il miglior polimero per la stampa 3D per applicazioni ad attrito ridotto
La soluzione a questi problemi è stata trovata con il sistema di produzione additiva di igus: il materiale SLS autolubrificante iglidur I6, appositamente sviluppato per produrre parti soggette ad attrito, è stato impiegato con successo per produrre i giunti delle dita. iglidur I6 è stato inizialmente sviluppato per la produzione di ruote a vite senza fine per giunti robot. È particolarmente stabile per la produzione di componenti con piccoli dettagli e superfici esatte, ed è caratterizzato da una durabilità e una resistenza all'usura straordinarie. iglidur 6 si è dimostrato adeguato per componenti funzionali durevoli nel laboratorio di prova igus: una ruota dentata realizzata in questo polimero iglidur resistente all'usura è stato testato per due mesi nelle stesse condizioni di una ruota dentata in POM lavorata a macchina. La ruota dentata in POM ha mostrato segni di usura elevata dopo 321.000 cicli è ha smesso di funzionare dopo 621.000 cicli, mentre la ruota dentata in iglidur I6 ha continuato a funzionare dopo 1 milione di cicli con segni di usura ridotti.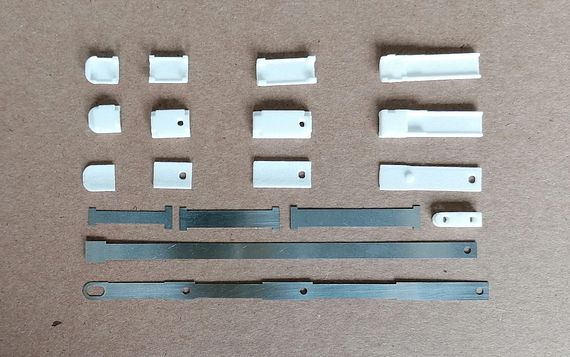
Il polimero autolubrificante è ideale per applicazioni nel settore della tecnologia medica.
Rispetto al metallo, iglidur I6 è particolarmente leggero, il che lo rende perfetto per l'impiego in applicazioni dovo un peso ridotto è fondamentale. Un vantaggio importante per i ricercatori dell'ETHZ, in quanto solo gli esoscheletri abbastanza leggeri e compatti sono adatti a un uso quotidiano. Con i giunti delle dita in iglidur I6 il modulo della mano pesa appena 148 grammi. I lubrificanti solidi incorporati nel polimero rendono superflua la lubrificazione esterna degli elementi, semplificando l'uso dell'innovativa applicazione terapeutica.La sinterizzazione laser come metodo di produzione è ideale per la replica di geometrie e strutture complesse, consentendo di produrre piccoli volumi e componenti singoli in modo economico. Ciò vale anche per gli esoscheletri RELab tenoexo che possono essere adattati individualmente al paziente. "Abbiamo sviluppato un algoritmo che ci permette di adattare il modello digitale dell'esoscheletro alle dimensioni della mano del paziente in pochi clic del mouse. "

Prototipi veloci o parti funzionali subito disponibili?
Il rapido sviluppo di nuovi prodotti e la produzione veloce di parti funzionali sono i vantaggi della velocità che offre alle aziende dei vantaggi concorrenziali e ai clienti soluzioni più immediate ai loro problemi. Caricando il modello 3D dei giunti delle dita necessari nel nostro strumento per il servizio di stampa 3D online, gli scienziati dell'ETHZ possono ordinare le parti necessarie in pochi minuti. La produzione vera e propria di norma avviene durante la notte e i giunti finiti possono essere montati dopo pochi giorni, quindi possono essere usati a scopi terapeutici. Non esiste un altro metodo produttivo tanto veloce ed economico quanto la stampa 3D per produrre piccoli volumi.
Ma le parti stampate in 3D sono adatte come parti funzionali nell'applicazione finale o si limitano al modesto ruolo di prototipi rapidamente disponibili? Noi siamo convinti delle straordinarie qualità dei nostri materiali: i componenti realizzati mediante produzione additiva nei polimeri iglidur vengono usati in molte altre applicazioni di clienti come parti funzionali prodotte in serie.
Ma le parti stampate in 3D sono adatte come parti funzionali nell'applicazione finale o si limitano al modesto ruolo di prototipi rapidamente disponibili? Noi siamo convinti delle straordinarie qualità dei nostri materiali: i componenti realizzati mediante produzione additiva nei polimeri iglidur vengono usati in molte altre applicazioni di clienti come parti funzionali prodotte in serie.
Maggiori informazioni sulla produzione additiva presso igus