Cambia lingua :
Il software di controllo robot igus
Programmazione, simulazione e controllo di robot senza licenza
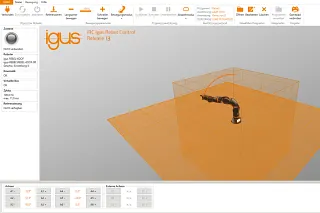
Il software igus Robot Control consente una programmazione e un controllo di robot semplici e intuitivi, semplificando l'avvio dell'automazione. Grazie alla struttura modulare, è possibile controllare diverse cinematiche di robot, ad esempio robot delta, robot lineari e robot articolati multiasse. Il software può essere utilizzato per simulare i singoli movimenti del robot sulla superficie 3D: il robot non deve essere collegato per questa fase.
Cosa troverai in questa pagina
Software per robot gratuiti
Esempi di programmazione di varie applicazioni con il software del robot
- Semplice collegamento tra robot e sistema di controllo
- Funzionamento intuitivo con interfaccia 3D e gemello digitale consente l'esecuzione diretta e il controllo delle sequenze di movimento
- Configurazione dell'interfaccia della telecamera possibile direttamente tramite sistema di controllo e software
- Programmazione di robot delta, lineari, SCARA e a bracci articolati
- Il software consente test senza rischi anche prima dell'acquisto
Requisiti di sistema:
- PC con sistema operativo Windows 10
- Comunicazione tramite Ethernet o WLAN
- 500 MB di spazio libero su disco
Programmi campione, wiki e corsi di formazione



Interfacce
Interfacce per PLC
L'interfaccia PLC (PLC = Programmable Logic Controller) consente l'esecuzione di funzioni di base e la segnalazione di stati tramite ingressi e uscite digitali. Oltre al controllo tramite PLC, questa interfaccia consente anche il funzionamento tramite pulsanti hardware.
Input e output digitali
I programmi del robot possono essere caricati e avviati e i comandi della pinza possono essere inviati tramite ingressi digitali o segnali globali. Questo è utile, ad esempio, se si desidera selezionare un programma da una selezione specifica utilizzando i pulsanti o l'istruzione CRI-GSig.
Modbus TCP/IP
L'interfaccia Modbus TCP può essere utilizzata per inviare dati e istruzioni PLC al sistema di controllo del robot e ricevere informazioni sullo stato, ad esempio.
Interfaccia CRI
L'interfaccia CRI consente l'invio di istruzioni complesse e il recupero di informazioni e impostazioni tramite l'interfaccia Ethernet tramite TCP/IP. L'igus Robot Control utilizza questa interfaccia per connettersi a robot con un sistema di controllo integrato o ad altre istanze del sistema di controllo.
Interfaccia per telecamera
L'interfaccia della telecamera consente l'utilizzo di telecamere e videocamere per il rilevamento di oggetti. Le telecamere per il rilevamento di oggetti riconoscono la posizione e la classe degli oggetti e le trasmettono, opzionalmente con un'immagine video, al sistema di controllo. Il sistema di controllo calcola le posizioni nel sistema di coordinate del robot in base alle posizioni degli oggetti rilevate dalla telecamera. Le semplici videocamere forniscono solo immagini e possono quindi essere utilizzate solo per monitorare l'area di lavoro, ma non per rilevare oggetti.
Cloud
L'interfaccia Cloud consente il monitoraggio del robot tramite RobotDimension. Una volta attivato e effettuato l'accesso, il robot invia informazioni di base sullo stato e immagini della telecamera al servizio online. L'utente può elencare i propri robot sul sito web e recuperare le informazioni.
ROS, Matlab, LabView e molti altri.
Integra i robot nel tuo ambiente ROS. Documentazione e pacchetti per la comunicazione hardware, Teleop e MoveI
Configurazioni di progetto
Pinza
Qui è possibile specificare la pinza assemblata. La modifica della pinza richiede il ricaricamento del progetto o il riavvio del sistema di controllo integrato. I nuovi utensili possono essere definiti come file di configurazione nella directory "Dati/Utensili"
Virtual box
L'intervallo di movimento del braccio robotico è limitato dalle impostazioni della virtual box. Questa funzionalità aiuta a prevenire danni meccanici e semplifica la programmazione, a seconda dell'applicazione. Se viene eseguito un programma che viola la virtual box, viene interrotto con un messaggio di errore.
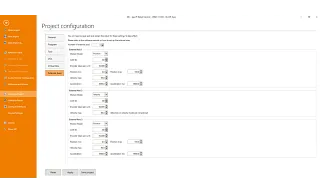
Asse esterno
Il sistema di controllo del robot supporta fino a 3 assi aggiuntivi (chiamati anche "assi esterni" in iRC). Questi possono essere installati in base agli assi del robot e configurati tramite l'area di configurazione di iRC.

Programma
Qui è possibile definire il programma del robot e la sua logica, la velocità di movimento (come percentuale della velocità massima), la modalità di riproduzione e la reazione agli errori del programma.
Cinematica speciale
Il sistema di controllo del robot può essere personalizzato per il tuo robot con un gemello digitale. Configuriamo la cinematica in base alle esigenze del tuo progetto.
Programmazione
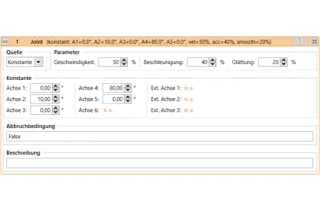
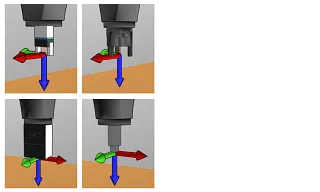
Movimenti degli assi
L'istruzione "Giunto" sposta il robot verso una posizione di destinazione assoluta specificata nelle coordinate degli assi (ad esempio l'angolo dell'asse o la posizione di un asse lineare). Il movimento risultante del TCP è solitamente una curva e non una linea retta.
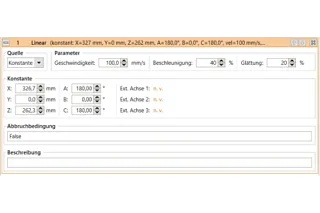
Movimento lineare
L'istruzione "Lineare" sposta il robot verso una posizione target assoluta specificata in coordinate cartesiane. Il movimento risultante del TCP segue una linea retta.
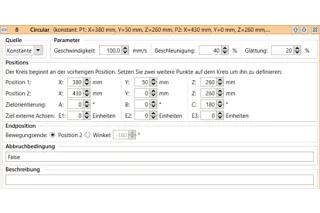
Movimenti circolari
L'istruzione "Movimento circolare" consente movimenti lungo un percorso circolare completo o parziale. È compatibile con i movimenti lineari, in modo da rendere più fluida la transizione da e verso movimenti lineari.
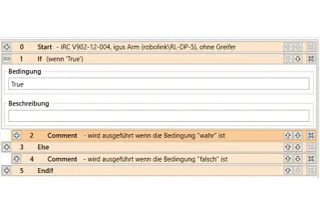
Condizioni
Le condizioni possono essere utilizzate in comandi if-then-else, cicli e come condizioni di annullamento nei comandi di movimento. Le condizioni possono essere combinazioni di ingressi digitali, segnali globali, operazioni booleane e confronti.
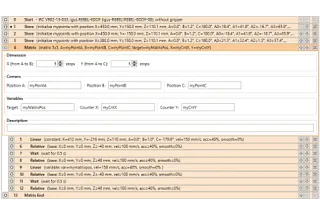
Calcolo della matrice
Le istruzioni della griglia calcolano le posizioni allineate a una griglia, ad esempio come posizione di presa o di deposito per attività di pallettizzazione.
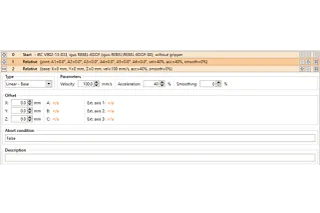
Relativo
L'istruzione "Relativo" consente di muovere il robot rispetto alla sua posizione attuale. È accessibile tramite le voci di menu "Azione" → "Movimento relativo".

Sottoprogrammi
I sottoprogrammi possono essere richiamati con il sottocomando. Il percorso al file del sottoprogramma è specificato in "Nome file". È relativo alla sottocartella "Programmi" della cartella "Dati" di iRC.
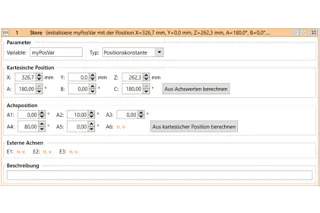
Variabili e accesso alle variabili
Nel programma per igus Robot Control e TinyCtrl sono supportati due tipi di variabili:
- Variabili numeriche: possono essere utilizzate per memorizzare numeri interi o in virgola mobile.
- Variabili di posizione: possono essere utilizzate per memorizzare posizioni cartesiane e posizioni dei giunti. L'interpretazione di tale variabile come posizione cartesiana o posizione del giunto dipende dal contesto.
Scarica il software del robot

Il software igus Robot Control, senza licenza, è integrato nel sistema di controllo e utilizza quindi un concetto operativo standardizzato e servizi di comunicazione uniformi per molti componenti di un sistema. Ciò significa meno lavoro di progettazione e una messa in servizio più rapida.
- Testate in anticipo tutte le cinematiche igus nel software
- Con progetti pre-programmati per tutti i robot igus, assi singoli e AGV
- Interfaccia 3D intuitiva con simulazione del robot
Consulenza
A tua disposizione per rispondere a dubbi e domande

Spedizioni e consulenza
Personale:
Dal lunedì al venerdì dalle 8:00 alle 18:00.
Sabato dalle 8:00 alle 12:00.
Online:
24h